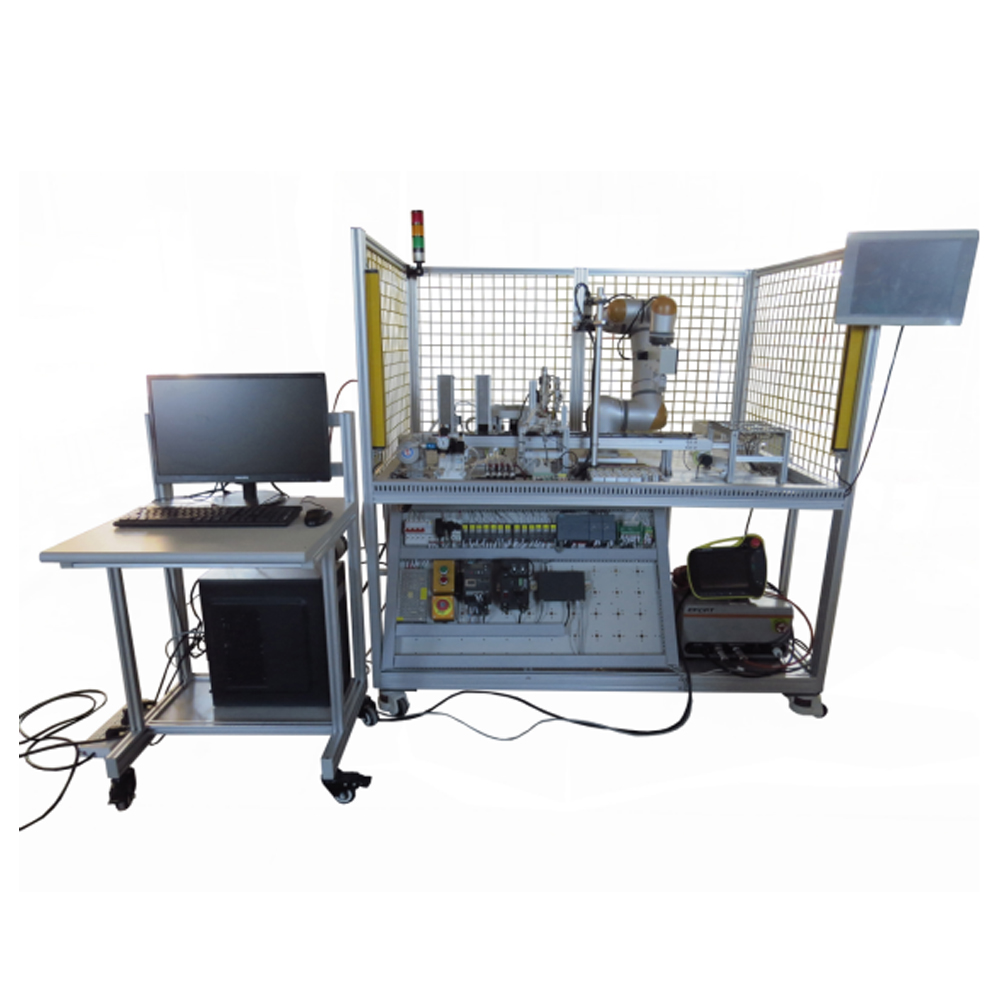
Collaborative 6-axes Robot Arm With Camera And Gripper Vocational Training Equipment Mechatronics Training Equipment
Item No.: AFM012R
Collaborative 6-axes Robot Arm With Camera And Gripper Vocational Training Equipment Mechatronics Training Equipment